洞察無形:高端模擬前端如何賦予機器人真正的自我感知能力

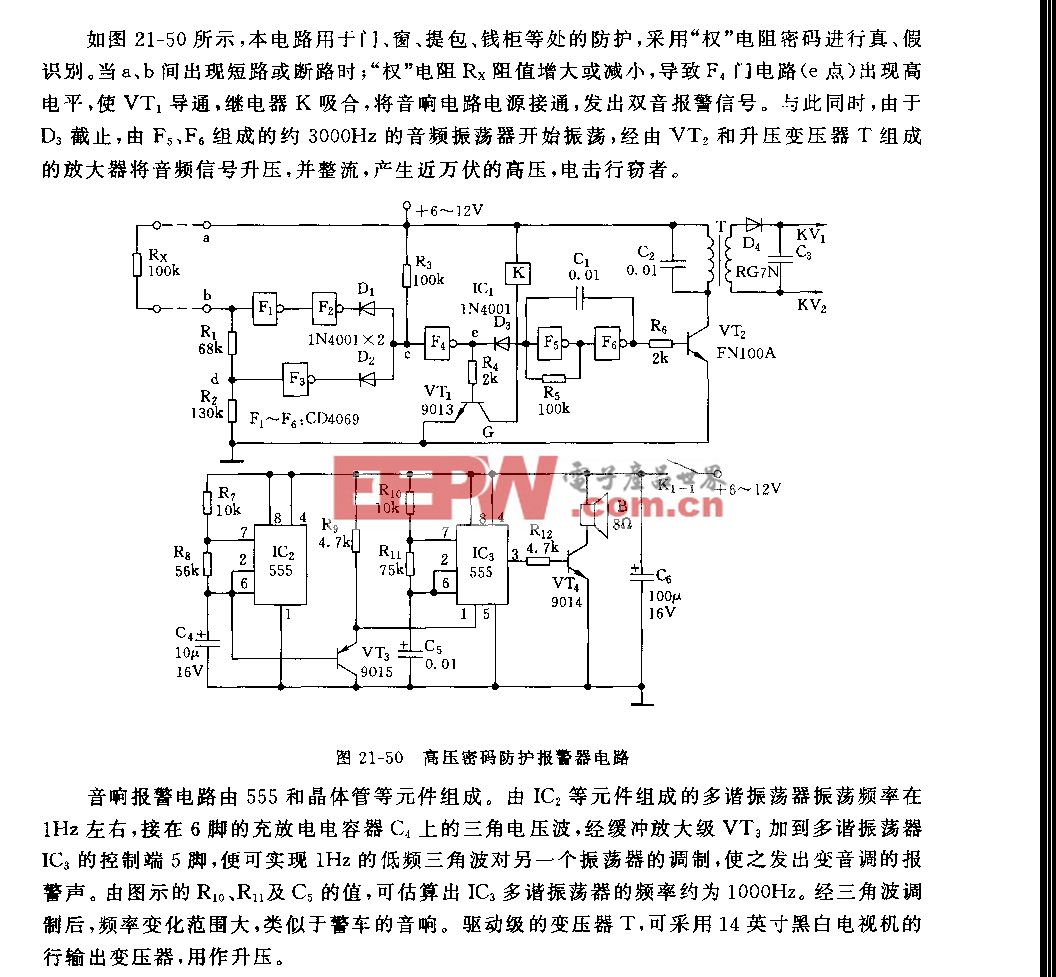
如果攝像頭、激光雷達和慣性傳感器是機器人的眼睛與內耳,那么高精度模擬測量就是機器人的 “自我感知神經”—— 它能實時感知電流、應變、溫度等狀態,讓機器真正掌握自身運行工況。
在實現這類感知的核心器件中,NAFEB43388 多通道模擬前端(AFE)表現尤為突出。它內置 8 路可配置輸入、最高 ±25V 輸入量程、24 位 Σ-Δ 模數轉換器 ADC、可編程增益放大器 PGA,還自帶電阻傳感器激勵源,具備極強的電磁兼容能力與防錯接保護,專為工業級測量精度和高可靠性打造。
它不能替代攝像頭、激光雷達,也無法實現 SLAM 同步定位與建圖。但對于自主移動機器人 AMR、人形機器人而言,若需要高精度采集力值、應變、電流、溫度信號,同時耐受工業環境電氣干擾,NAFEB43388 就是不可或缺的核心基礎芯片。
芯片核心概覽及價值
·8 路模擬輸入,支持單端 / 差分模式,可配置測量電壓、電流、電阻、RTD 鉑電阻、熱電偶
·輸入量程 ±25V,過壓保護最高可達 ±36V
·24 位 Σ-Δ ADC、可編程增益放大器(1~64 倍),集成電壓 / 電流激勵源、低溫漂基準源
·采樣速率 7.5SPS~288kSPS;約 72kSPS 時有效位數可達 17bit;采用 SPI 通信接口
·輸入端口具備 EMC 抗干擾、硬件診斷、CRC 校驗,工作溫區 - 40℃~+125℃,封裝為 6mm×6mm 40 引腳 HVQFN
簡單來說,它是一顆微型化工業數據采集前端,非常適合嵌入式設備做持續精密監測,幫助機器人延長壽命、負載更智能、行走更安全。
自主移動機器人 AMR:把精度用在關鍵場景
場景一:叉車式 AMR 智能防超載
倉儲 AMR 叉車行駛到托盤下方、舉升貨叉后,會先檢測升降支架四周的 4 路稱重傳感器。
NAFEB43388 適配稱重傳感器與應變橋路測量需求,提供精密激勵電壓、可編程增益放大,再以 24 位高精度模數轉換,可分辨微小負載偏移,比如貨物堆放偏心等細節。8 路通道可覆蓋平臺、立柱多點同步采集,同時獲取總負載與重量分布,保障行駛平衡與安全。
實際價值:減少托盤傾倒事故;依據真實負載設定行駛速度與路徑,而非依靠估算值。

叉車 AMR 在搬運前校驗負載,稱重傳感將舉升力轉化為可用于安全決策的數據。
場景二:提前預警軸承、剎車及電池健康狀態
機器人長期運行數月后,云端平臺會捕捉到趨勢變化:同等轉速和負載下,電機相電流緩慢上升,同時車輪變速箱附近溫度小幅走高。
NAFEB43388 可多路切換采集分流電阻電流、RTD、熱電偶、母線電壓等信號,將電氣與溫度數據融合,形成整機健康評分。72kSPS 采樣下保有 17bit 有效精度,既能滿足診斷采樣速度,又具備直流長期監測低漂移特性。工業級輸入防護,可在復雜電磁環境下穩定工作。
實際價值:由突發故障維修轉為計劃性停機維護,實現視情維保。
場景三:適應惡劣地面與線路錯接工況
工廠、倉庫布線環境復雜,容易出現接線錯誤、熱插拔異常、浪涌干擾。NAFEB43388 具備 ±36V 過壓耐受、ESD 及浪涌防護,容錯能力遠超普通 AFE 和單片機內置 ADC,降低設備故障率,減少機械、電氣、固件團隊之間的責任推諉。
人形機器人:不止視覺感知,更能感知物理世界
足部地面感知能力
人形機器人站立在凹凸格柵地面時,攝像頭和 IMU 能定位位置,但平衡控制需要感知每只腳的受力分布。
NAFEB43388 適合多軸足部力 / 扭矩傳感器、分布式稱重傳感器的低噪聲同步采集;通過通道配置與共用激勵源,可捕捉微小負載偏移,對零力矩點控制、受外力推搡后的姿態恢復至關重要。這類場景更看重測量精度而非超高采樣率,Σ-Δ ADC 的延遲適配 100~500Hz 控制環路需求。

人形機器人足部力傳感,通過分布式負載測量實現平衡控制與早期故障檢測。
關節扭矩精準感知與極限管控
串聯彈性執行器 SEA 關節內置應變結構,需要精準扭矩實現阻抗控制。
NAFEB43388 的 24 位 ADC、可編程增益、傳感器激勵源非常適配應變片測量。但不適合 5~20kHz 高頻電機電流內環控制;建議電機電流內環使用驅動器內置高速 SAR ADC + 隔離采樣,將這顆 AFE 用于外環阻抗控制與安全監測。
隱性狀態監測:溫度、電壓與結構應變
人形機器人功率密度高,在電機端蓋植入 RTD、逆變器布置熱電偶、承重結構粘貼應變片,可提前發現絕緣老化、結構形變隱患。NAFEB43388 自帶校準基準與診斷功能,無需額外外掛模擬輔助電路板,即可把微弱狀態信號轉為可分析的遙測數據。
快速草圖:它在堆棧中的位置

AMR 負載與健康傳感架構框圖

人形機器人足部與關節傳感架構框圖
適用邊界:哪些場景不適合用
·激光雷達、攝像頭、雷達、IMU 等 SLAM 視覺感知屬于高帶寬數字領域,AFE 無法發揮作用;
·電機電流高頻內環控制,應選用帶高速 SAR ADC 的電機驅動 + 隔離采樣,Σ-Δ 型 AFE 只適合外環與診斷;
·大面積觸覺陣列、成千上萬個傳感觸點,應選用陣列專用芯片或矩陣掃描方案,不適合 8 通道精密 AFE。
以上局限源于 Σ-Δ 轉換機制與通道數量,它擅長高精度,而非超高吞吐量。
設計使用要點
1.合理配置采樣速率
力、扭矩、RTD 測溫控制環路常用 500Hz 以內帶寬;芯片支持 7.5SPS~288kSPS 寬范圍速率,可按需平衡延遲與有效位數。
2.充分利用內置激勵源
橋路傳感器需要穩定激勵電壓,使用芯片內置激勵可精簡 BOM、節省 PCB 面積,降低增益與零點漂移,配合內部基準簡化現場校準。
3.預留 SPI 通信帶寬
8 路高速率采樣數據量大,需提前規劃 SPI 時鐘、DMA 與緩沖區;多點力采集采用同步采樣,避免平衡與負載估算出現混疊誤差。
4.優先考慮硬件防護布局
芯片一大優勢是 ESD、浪涌、錯接防護能力;高壓模擬走線需滿足電氣間隙與爬電距離,功率強干擾區域物理隔離,保證實測精度不受工業環境影響。
5.快速評估開發
恩智浦提供 NAFEB43388 Arduino 擴展板評估套件與示例固件,可快速驗證電壓、電流、RTD、熱電偶多種測量模式,降低機器人團隊模擬電路開發門檻。
實際應用案例
智能負重 AMR 案例
某物流 AMR 頻繁出現車輪打滑異常。工程師在升降平臺布置 4 路稱重傳感器接入 NAFEB43388,實時估算負載重量與重心偏移。導航系統依據實際重量和偏心量自動限制行駛速度與轉向角度,一個月內打滑干預次數減少 40%,輪胎磨損明顯降低。芯片 ±25V 寬輸入與 EMC 防護,可直接適配叉車強電氣干擾環境,無需重新改版硬件。
步態更穩的人形機器人案例
某雙足機器人在格柵地面腳尖離地姿態易失衡。在前腳掌布置分布式稱重傳感器,通過 NAFEB43388 同步采集,控制器可識別微小側向負載變化,實時調節腳踝阻抗。200Hz 控制環路適配芯片延遲特性,內部校準基準可在車載功率器件溫度波動下,維持長期測量精度穩定。
選型適配對照表
需求場景 | NAFEB43388 適配度 | 原因說明 |
負載稱重、應變精密測量 | 非常適合 | 橋路傳感 + 內置激勵 + 24 位高精度 |
電池健康與溫度診斷 | 非常適合 | 兼容電壓、RTD、熱電偶多類信號 |
人形機器人足部力控平衡 | 適合 | 高有效位數、多點同步采集 |
電機電流高頻內環控制 | 不適合 | Σ-Δ 延遲高,改用 SAR 高速 ADC |
視覺 SLAM 感知 | 不適用 | 純數字高帶寬領域 |
極低成本入門機器人 | 性能過剩 | 普通單片機 ADC 即可滿足 |
總結
NAFEB43388 不是機器人導航視覺的核心主角,卻是保障機器人可靠、安全、耐久運行的專用精密感知器件。在 AMR 設備中,它實現負載精準檢測與設備視情維保;在人形機器人中,它賦予機器力控、扭矩感知、姿態平衡與健康監測能力,但不適合高頻電機電流內環。
只要用在對精度、抗干擾、可配置性有要求的場景,搭配合適的驅動與控制架構,機器人不僅能 “看得見” 環境,更能真切感知自身狀態、實現真正的自我認知。





評論