如何控制無刷電機

無刷直流電機(也稱為無刷電機或 BLDC 電機)廣泛用于高可靠性、高性能運動控制場合。它不使用會產生粉塵并磨損的機械電刷,而是采用電子換相方式工作。BLDC 電機的優點是轉矩輸出大、轉速高、無刷運行;但其主要缺點是成本相對高于有刷直流電機或步進電機。
BLDC 電機主要分為兩大類:旋轉式 BLDC 電機和直線式 BLDC 電機。其中旋轉電機還可進一步細分,主要根據內轉子 / 外轉子結構以及軸向磁通 / 徑向磁通設計來區分。內轉子 BLDC 電機又分為內置永磁體(IPM)型和表貼永磁體型。最后,鐵芯結構形式還可將其分為有槽 BLDC 電機和無槽 BLDC 電機。
這些結構差異大多數對電機控制方法影響很小,但會對關鍵性能指標產生顯著影響,包括轉矩重量比、運行平順性、最大加速度和最高轉速。

圖 1 該圖表對比了有刷直流電機、步進電機和無刷直流電機的轉矩重量比與功率重量比
三相無刷電機在眾多定位類電機中處于什么位置?圖 1 通過兩張圖表對比了不同類型電機在兩項關鍵性能指標上的表現:輸出功率重量比和輸出轉矩重量比。對于特定應用,通常其中一項指標會比另一項更重要。不過二者實際上是相關的,因為功率的定義就是轉矩乘以轉速。
無刷直流電機的磁學原理至關重要
弄清電機內部的工作原理以及無刷電機如何產生轉矩,是理解各種 BLDC 控制方法的基礎。圖 2 沿電機旋轉軸向下觀察,并將轉子和定子磁場投影到 XY 平面上。

圖 2 三相 BLDC 電機的轉子與定子磁場矢量
轉矩由轉子上的永磁體和定子繞組產生的磁場相互作用而生成。定子的每相繞組(圖 2 中標記為 A 相、B 相和 C 相繞組)各自產生磁場矢量,彼此之間相差 120° 電角度。這些獨立矢量被稱為繞組電流空間矢量。
由于它們共用同一個鐵芯,定子磁場的合成方向可看作由三個獨立繞組矢量相加得到的單個矢量,這個合成矢量被稱為定子電流空間矢量。

圖 3 A、B、C 三相繞組矢量疊加形成定子電流空間矢量
定子繞組產生的三個磁場如何合成為一個定子電流空間矢量?答案是:定子合成矢量的方向和幅值等于各相繞組電流空間矢量的矢量和(圖 3)。Ia、Ib、Ic 分別是 A 相繞組電流 Ia、B 相繞組電流 Ib、C 相繞組電流 Ic 所產生的磁場。
這三個彼此相差 120° 的磁矢量,因繞組中流過的電流不同而具有不同幅值。上圖示例中,Ia 電流為 3.4A,Ib 為 1.0A,Ic 為 4.4A。它們被繪制在 XY 平面內,通過將各矢量 “首尾相連” 得到合成矢量,最終形成圖 3 中綠色所示的定子總磁矢量。
當轉子磁場角度與定子磁場角度相互垂直時,產生旋轉運動的Q(轉矩)分量達到最大,而不產生旋轉運動的D(直軸)分量為零。反之,如果轉子磁場與定子合成磁場平行,則 Q 分量為零,D 分量達到最大。只有垂直的 Q 分量能產生有效的旋轉轉矩,平行的 D 分量只會對轉子產生徑向壓力,不產生任何旋轉轉矩。
為產生最大轉矩,控制器會控制定子矢量角度,使其始終與轉子磁場角度保持垂直。這一過程稱為換相—— 控制器通過電機上的位置傳感器信號獲取轉子位置,從而在轉子旋轉時實時調整定子磁場角度。關于換相的更多內容將在后續專門文章中詳細介紹。
BLDC 電機極數的重要性
BLDC 電機結構的一個關鍵要素是電機極數。無刷電機的繞組設計可以做到:
機械旋轉 360° 對應定子磁場電角度旋轉 360°;
或對應兩次電角度 360° 旋轉;
甚至對應多次電角度旋轉。
注意,此處 360° 電角度旋轉指定子磁場角度完成一圈旋轉。
機械旋轉一圈對應定子磁場旋轉一圈的電機為兩極電機(經過一對 N、S 極),兩極電機有時也稱為一對極電機。
機械旋轉一圈對應兩次電角度旋轉的為四極電機。
BLDC 電機可以有 2、4、6、12 極或其他偶數極數。在所有情況下,極對數 = 極數 ÷ 2。
不同極數的 BLDC 電機各有什么優缺點?總體而言:極數越高,BLDC 電機輸出轉矩越大,但最高轉速越低。雖然有許多電機設計因素會影響這兩項指標,但在其他條件相同的情況下,這是極數不同帶來的主要性能差異。
旋轉式與直線式 BLDC 電機的區別
到目前為止我們只討論了旋轉電機,但上述所有原理同樣適用于直線無刷電機。
直線 BLDC 電機是如何構造的?圖 4 對比了直線電機與旋轉電機的結構。直線無刷直流電機本質上就是 “展開鋪平” 的旋轉電機。二者都有容納線圈的定子,以及包含永磁體的轉子。

圖 4 旋轉電機與直線無刷直流電機的結構布局對比
注意:對于直線電機來說,“轉子” 這個叫法容易產生歧義,因為它并不旋轉。但行業內仍沿用該叫法,因為沒有其他公認的標準術語來稱呼直線電機的這一部件。
從設定定子磁場角度的角度來看,直線電機的控制與旋轉無刷電機類似。直線電機同樣通過換相控制定子繞組的矢量角度,以最大化有效 Q 轉矩、最小化無效 D 轉矩。
直線 BLDC 電機的定子和轉子有兩種不同配置方式:一種是定子(帶線圈的部分)固定、轉子(帶磁體的部分)運動;另一種則相反,定子運動、轉子固定(圖 5、圖 6)。

圖 5 該直線 BLDC 電機中,定子固定,動子沿導軌運動

圖 6 該直線 BLDC 電機采用定子運動、永磁導軌固定的結構
直線 BLDC 電機的 “導軌” 布局還有一種桿式變體。桿內包含交替 N/S 取向的磁體,因此充當轉子。同樣,既可以是轉子(桿)運動而定子固定,也可以更常見地采用轉子固定、定子在其上移動的方案(圖 7)。

圖 7 這種桿式直線 BLDC 電機具有交替磁極
無論采用哪種結構,直線無刷電機都是要求高可靠性、快速響應應用的熱門選擇。雖然比將旋轉運動轉換為直線運動的執行機構(如滾珠絲杠、齒輪齒條等)成本高得多,但其定位精度要高得多。這是因為旋轉轉直線機構不可避免地會引入回程間隙和柔性變形,降低最終定位精度。
推動直線 BLDC 電機普及的因素之一是高分辨率編碼器價格變得相對親民。新型編碼器如正余弦編碼器和 BiSS-C 串行編碼器接口已得到廣泛應用。結合先進的信號處理電子電路,直線平臺與 XY 平臺可實現納米級甚至皮米級的超高定位分辨率。
BLDC 電機控制器的基本組成
在完成 BLDC 電機的總體介紹后,我們可以深入本系列核心主題:如何控制無刷電機。
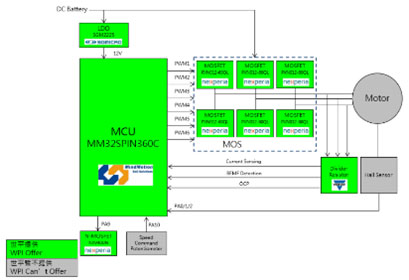
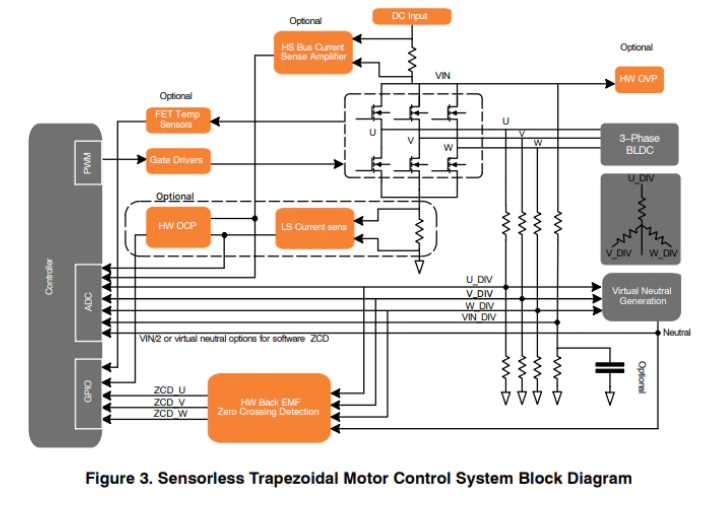
BLDC 電機屬于 “多相” 器件,即通過對定子上多個電機線圈通電來產生旋轉運動。圖 8 展示了三相無刷電機控制器的控制架構。

圖 8 該控制流程圖展示了 BLDC 系統的軌跡生成、換相、電流控制及功率放大環節
大多數 BLDC 電機控制器都包含幾個基本模塊。首先是軌跡規劃模塊,軌跡指令可由控制器內部生成,也可通過網絡從外部輸入。運動軌跡的選擇取決于具體應用,但它是控制器整體運行的重要環節,有助于最大化吞吐量并減小被驅動機構的振動。
對于位置控制應用,位置閉環會生成電流指令,以減小目標(指令)位置與實際(檢測)電機位置之間的誤差。部分應用僅需要速度控制而非位置控制,此時控制器會使用速度伺服環代替位置環。
無論哪種情況,該閉環的輸出都是目標電流指令,可理解為電機需要產生的轉矩大小。
隨后對電流指令進行換相處理,即將總目標電流分配為三相繞組各自的獨立指令。根據所使用的位置傳感器以及對效率和平順性的要求,存在多種換相方案。
接下來,電流閉環檢測每相繞組的實際電流,并調節施加電壓,使實際電流緊密跟蹤指令電流。
最后,功率放大器將電壓指令施加到各相繞組。如今,大多數放大器采用基于脈寬調制(PWM)的開關橋設計,因其效率極高且易于控制。但在需要超低電磁干擾(EMI)的電子系統中,仍可能使用線性放大器。
不同 BLDC 電機控制器的架構存在明顯差異。例如,部分控制器不采用電機繞組主動電流控制;在非定位類應用中,有些控制器完全省去位置傳感器 —— 這種方案稱為無傳感器控制。


評論