支持CAN總線的電動車熱心腸!助力逆變電源設計

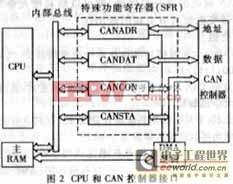
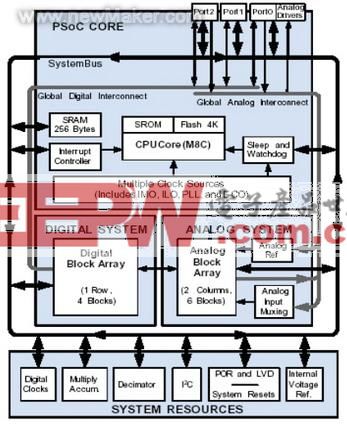
啟用CAN控制器的功能,主要借助四個特殊功能寄存器(SPR)實現,CPU對CAN控制器的控制及其訪問都通過它們完成,接口結構如圖2所示。這四個特殊功能寄存器分別為:(1)地址寄存器(CANADR),CPU通過CANADR讀/寫CAN控制器的驗收碼寄存器;(2)數據寄存器(CANDAT),CANDAT對應由CANADR指向的CAN控制器內部寄存器;(3)控制寄存器(CANCON),它具有兩個功能,讀CANCON意味著訪問CAN控制器的中斷寄存器,寫CANCON意味著訪問命令寄存器;(4)狀態寄存器(CANSTA),具有兩個功能,讀CANSTA是訪問CAN控制器的狀態寄存器,寫CANSTA是為后續的DMA傳輸設置內部數據存儲器RAM的地址。此外,DMA邏輯允許CAN控制器與CPU在片主RAM之間的高速數據交換。
在芯片初始化階段,CPU通過向CANCON和CANSTA寫入內容,完成CAN控制器的功能初始化。在實際通訊過程中,CPU則利用四個寄存器使CAN控制器接收和發送數據信息。 2 逆變電源系統硬件構成
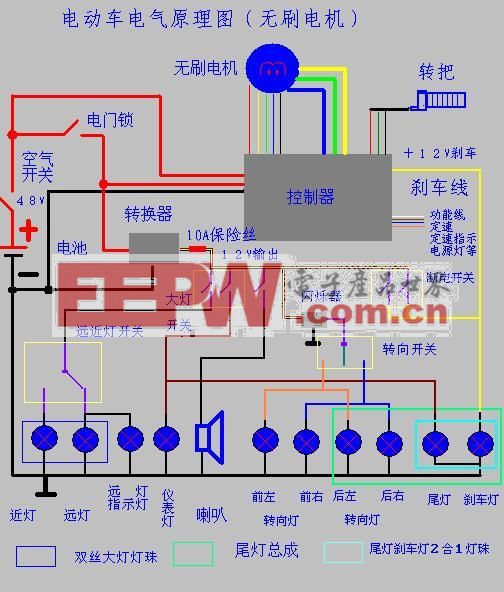
電動車用輔助三相逆變電源從結構上可以分為三個部分:(1)DC/DC多路電源--自動適應直流輸入端的大范圍電壓浮動,為系統的其它電路提供彼此隔離且電壓穩定的低壓電源;(2)主控制板--檢測各路輸出的電壓、電流,根據運行情況智能調整逆變電路的輸出,通過CAN總線參與整車數據通訊;(3)主功率逆變電路--由高度集成的三相逆變模塊IPM組成,完成主電路的逆變功能。
系統基本結構圖如圖3所示,其中未標出給系統各器件供電的DC/DC多路電源。

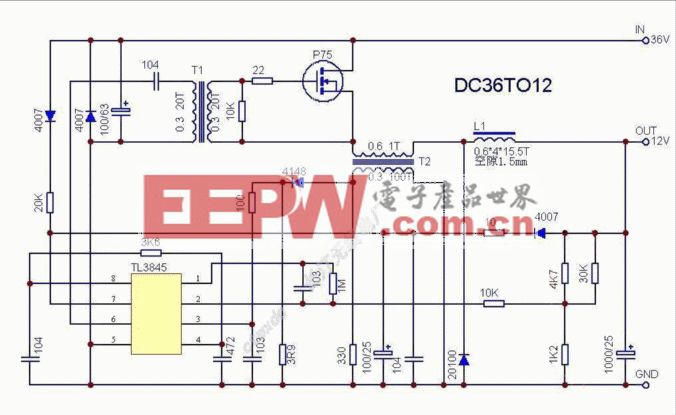
DC/DC多路電源采用開關電源的標準設計,配合具有不同變比的多抽頭高頻變壓器,對外輸出5V、12V、20V等多路隔離直流電。同時考慮到電動車電池組電壓的波動范圍相對較大(充滿時為400V,使用過程中可能降低到280V),在設計中選擇了適當的電路結構,取得較好的輸入電壓適應能力。
控制板是整個系統的核心,采用了P8xC592單片機系列中無片內ROM的P80C592、脈寬調制專用芯片SA8282、CAN總線收發器82C250以及主電路電壓、電流數據采樣模塊等。
控制板通過SA8282專用芯片向三相逆變模塊IPM提供6路PWM信號。SA8282芯片由MITEL公司開發生產,其特點是控制簡單、頻率精度高、運行可靠性高,它支持標準的8位MOTEL復用數據總線,可以方便地和單片機交換數據。單片機只需對芯片內部的5個數據寄存器賦值,就可以完成對PWM波形輸出的初始化和實時控制。SA8282芯片為標準28腳雙列直插式封裝,管腳RPHT、RPHB、YPHT、YPHB、BPHT、BPHB輸出三相可獨立控制的TTL驅動信號,可對應驅動三相逆變橋上的六路IGBT。
將SA8282專用芯片與IPM連接后,P80C892只需要在啟動時對其進行初始化,三相輸出達到預定值后,SA8282即可以獨立驅動IPM模塊。只有在調整PWM輸出時,P80C592才需要對SA8282進行控制。同時,SA8282芯片的SET TRIP管腳能夠響應IPM發出的故障信號,迅速關斷所有PWM波形輸出,對逆變電路進行快速保護,并通過TRIP狀態輸出管腳通知P80C592單片機,確保系統安全。
分布于主電路直流輸入端和三相輸出端的數據采集模塊可對各路電壓、電流進行采樣,經P80C592進行A/D變換后保存到數據存儲器中,便于CPU判斷系統輸入/輸出是否正常,并進行相應操作。
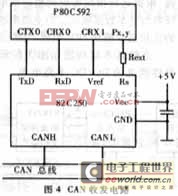
CAN總線收發器82C250是CAN控制器和物理總線間的接口,最初為汽車高速通信設計,具有許多針對車輛應用設計的結構。其特點包括:有效減小汽車環境瞬間干擾對信號的影響,具有保護總線能力;防護電池與地之間發生短路;支持低電流待機方式等,因此十分適合電動車輔助逆變電源的需要。將82C250與P80C592的CAN接口輸入、輸出端相連,便構成了輔助逆變電源對外通訊的接口,如圖4所示。
3 逆變電源系統軟件設計
輔助三相逆變電源的控制軟件通過8051匯編語言編制,在完成其控制功能外,力求程序的合理與簡化,以適應電動汽車對系統穩定性和可靠性的要求,控制流程如圖5所示。
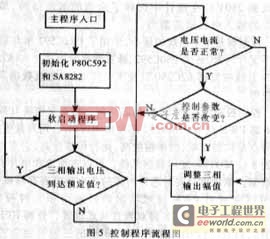
系統上電運行后,單片機P80C952首先對SA8282芯片的初始化寄存器進行數據初始化,然后根據負載電機的特點執行軟啟動程序。當三相輸出電壓達到預定值時,三相逆變電源即進入穩定運行狀態。此后控制程序將循環檢測各線路的電壓、電流情況,根據情況修改SA8282控制寄存器參數,調整PWM輸出,從而改變三相輸出。例如,電動車運行一段時間后,電池組電壓下降,導致逆變電源的三相輸出電壓低于設定值,P80C592檢測到該現象后,通過SA8282提高電壓輸出幅值,確保電源輸出的穩定。
同時,控制程序還將定期檢測數據存儲器中的控制參數。若整車控制系統通過CAN通訊修改了逆變電源的運行參數,P80C592將根據新的運行參數調整輸出。
控制程序中的三個中斷程序分別為:數據采樣程序、CAN總線通訊程序和故障處理程序。
數據采樣程序通過芯片內部計數器定時觸發,對逆變電源的輸入、輸出線路進行數據采樣,經模/數轉換后存入數據存儲器,交給CPU進行運行狀況判斷。

CAN總線通訊程序包含若干子程序,其基本程序結構如圖6所示。當通訊程序觸發后,P80C592的CAN控制器根據命令字執行相關任務。當上位機請求數據時,將逆變電源的各項運行參數傳輸給整車系統;當上位機查詢節點狀態時,將當前CAN節點狀態等數據發送出去;當上位機要求修改運行參數時,將接收的控制參數存入數據存儲器。
故障處理程序具有最高的中斷優先權,即將P80C592的外部中斷0(INT0)管腳與SA8282芯片的TRIP管腳相連。當逆變電路發生故障時,IPM會發出故障信號給SA8282芯片,由后者在第一時間關斷PWM輸出,并向P80C592發出中斷信號,觸發故障處理程序。故障處理程序首先將SA8282關閉;然后通過CAN總線通知上位機有故障發生,并將故障代碼和當前系統運行參數寫入報文同時發送;最后控制單片機將整個系統關閉,實現安全關機。
CAN通信網絡的引入為電動車的全局優化控制提供了條件,車輛的每個子系統都因此成為整車控制中的智能節點。采用集成CAN控制器的P8xC592單片機作為控制核心,結合SA8282專用PWM波形發生芯片設計出的電動車用輔助三相逆變電源,不僅安全穩定性高,還能夠充分參與整車的數據交換和控制。對于采用不同CAN總線協議的電動車輛,只需適當修改控制程序中有關CAN通訊的部分程序段,就可以順利接入整車系統,使該逆變電源具有更強的通用性。



評論