微創機器人從手結構的設計及運動學分析

 (1)
(1) (2)
(2) (3)
(3) (4)
(4) (5)
(5)機器人末桿在及坐標系中的位姿矩陣為
 (6)
(6)其中

運動學方程逆解
根據正解結果,反求出機器人的各關節值。

工作空間分析
通過工作空間分析,按照實際的手術空間要求,得出機構的參數。
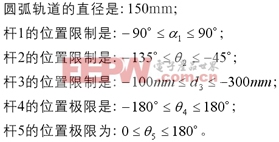
結合運動學分析及實際情況,設置機器人各桿的尺寸及極限位置如下:
結論
本文在分析“扭轉打結法”打結過程的基礎上,設計了一種新型的微創縫合打結機器人,并詳細闡述了機器人的運動學解算過程,結合實際給出了設置機器人各桿的尺寸及極限位置的參數。
作者簡介
尚鳳玲 河南工業大學在讀研究生。
參考文獻
[1] howe d,yoky matsuoka.robotics for surgery[m].london:biomed, 1999.
[2] 王田苗等. 醫療外科機器人的研究開發與產業化前景[j].機器人, 2000, 22(7):897~901.
[3] mayer, hermann; gomez, faustino; wierstra, daan.a system for robotic heart surgery that learns to tie knots using recurrent neural networks[j]. advanced robotics,, 2008, 22:1521-1537(17).
[4] t.asao, s.yamaguchi, s.tsutsumi.experimental results and early clinical experience with an easy method for intracorporeal knot tying using a novel laparoscopic needleholder[j].surgical endoscopy, 2007,21:1553-1556.
[5] 岳龍旺.外殼手術機器人縫合打結研究[d].天津:天津大學,2006.

評論