基于虛擬儀器的開關磁阻電機監控系統設計方案

1.6 需要注意的事項
(1)由于SRM為8/6極,A、C兩相并不同時導通,這兩相可以共用一個電流傳感器。同樣,B、D兩相也可共用一個電流傳感器。
(2)傳感器所獲取的信號中必然會摻進一些雜波,如果不進行必要的濾波處理,結果將可能與實際值相差比較大。LabVIEW的Filter模塊提供了比較常用的一些濾波方式,可以很方便地去除雜波。
(3)選擇電壓和電流傳感器時,應該注意它們的測量范圍。同時,為了保證足夠的精度,應該使得電壓傳感器和電流傳感器工作在最佳狀態。2 轉矩和磁鏈值顯示
虛擬儀器不僅可以快速執行數據采集的任務,而且可以借助PC機實現很強的數據處理能力。在獲取轉速、端電壓和相電流數據以后,可以利用PC機進行實時計算以得出磁鏈和轉矩值并顯示出來。
2.1 磁鏈計算
磁鏈值的求取可以依照式(1)進行:
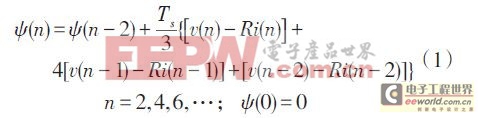
式中:Ts 為每兩次采樣間隔時間;R 為電機繞組的阻值。
為了盡可能地減少數據運算時間,提高運行速度,也可以用查表方法得出磁鏈值。即先將不同的電流i與角度θ 下的磁鏈值ψ(i,θ) 存儲下來,這樣在運行時可以很快用線性擬合的方法得出不同電流與角度下的磁鏈值。當然,這樣處理的結果是使得誤差增大。但誤差依在可接受的范圍以內[6].
2.2 轉矩計算
轉矩的計算原理如式(2)所示:

式中:J 為系統轉動慣量;ω 為電機轉速;B 為粘滯磨擦系數;TL 為負載轉矩。
3 運行分析
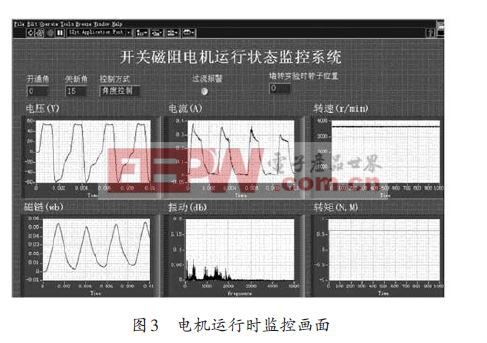
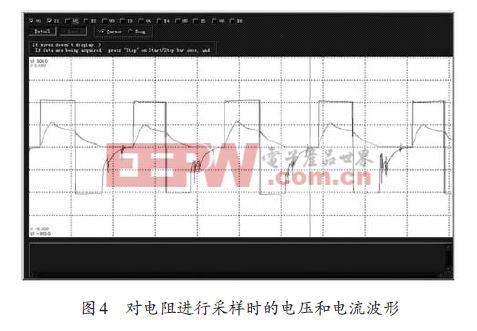
電機輕載穩定運行時的狀態監控圖如3所示。為了觀看方便,圖中只給出了單相的監測情況。假定工作中出現的最嚴重情況是PC機不能正常工作,且霍爾電壓傳感器和霍爾電流傳感器均已損壞。此時備用的DSP 將開始代替PC 機工作。在負載為1.25 NM,轉速為1 200 rad,導通角為4°,并斷角為20°時,電壓和電流波形如圖4所示。
圖4 中,橫坐標為1 ms/格,縱坐標為電壓曲線100 V/格,電流曲線3 A/格。對于在強迫換向階段,圖4中電壓曲線出現的毛刺,分析原因是此時繞組兩端開關雖然均已斷開,但繞組磁場能量仍然通過兩端的二極管進行釋放。由于采用一般的橋式整流電路作為直流電源,其輸出電壓并不能保證恒定不變,因此在強迫換流階段,采樣電阻端電壓不穩定。
4 結語
本方案所設計的監控系統非常直觀且精確地表現了電機運行的各項重要參數,相比于傳統使用各種設備來觀測數據,大大提高了工作效率,也節省了成本。該系統可以根據SRM運行情況,實時修改導通角、關斷角和脈沖時間間隔等參數,以控制電機的運行速度和輸出轉矩等。實驗證明,該控制系統的實用性和可靠性比之前大大提高。另外,備用的檢測回路和DSP運算系統,也為該系統增加了更高的可靠性。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理
評論