汽車自動巡航系統PID控制策略的研究

5 系統軟件流程
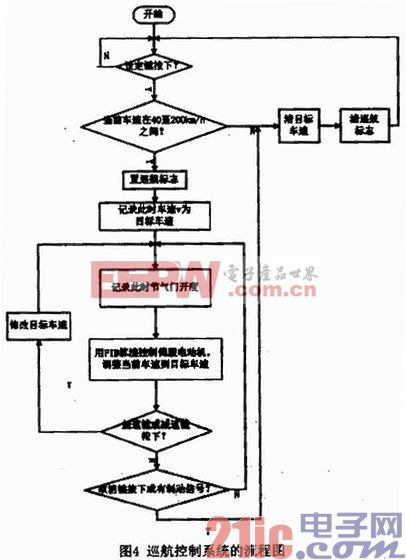
巡航控制過程如圖4所示。在汽車電子巡航控制系統中,實際車速信號反饋至電子控制器,并與設定車速進行比較,因而系統工作在閉環控制方式,采用的控射方法是增量式PID控制策略。通過對單片機編程調節直流電機的轉速和節氣門的開度,使車速在允許的誤差范圍內保持穩定。本文引用地址:http://www.cqxgywz.com/article/196189.htm
為清晰闡述汽車自動巡航系統的軟件設計,下面從模塊化角度說明單片機軟件編程部分的組成,單片機編程涉及的模塊主要有初始化模塊、鍵盤掃描模塊、啟動判斷模塊、通訊模塊、中斷模塊、定時模塊、看門狗模塊等。
系統檢測是否有按鍵按下,當巡航開關接通時,啟動判斷程序判斷車速采集程序獲得的車速信號是否在可巡航的范圍內,此時設定鍵有效時,實際車速需維持在此時速度。定時程序塊實現定時,達到定時點時間時發生中斷,采集實際車速與設定值比較,若差值在誤差允許范圍內不動作,若不在,則進入電動機轉速控制的程序段實現車速整定。當檢測到加速或減速按鍵按下時,首先修改車速設定值,然后進入電機轉速控制的程序段實現加速或減速;當檢測到制動開關接通時退出巡航控制系統。
6 結論
本文將PID控制算法與Atmega 8單片機相結合,應用于汽車自動巡航控制系統的研究,有效地實現車輛在誤差允許范圍內的穩定行駛,可以減輕長時間駕駛旅途中駕駛員的勞動強度,進而減少交通事故的發生。也使得PID控制算法在汽車電子中有更為廣泛的應用。











評論