高壓雙電源智能控制系統的研制

(3)編程與設置:允許用戶對工作狀態“自動/手動”、“一路優先供電、二路優先供電和無優先供電”通信參數、轉換需要的各種延時等參數進行更改設定。
(4)直流電源:控制器的供電電源可以外接直流供電(12V~24V)也可以不接;不接時,當兩路A相電壓都沒有時,系統報警。
(5)參數整定:控制器的所有參數均采用數字化調整,每個參數均可以單獨調整,因此不會對其它參數造成影響,提高了整機的可靠性和穩定性。在兩個電源轉換的過程中,為了使供電電路穩定,保證切換過程的準確性和安全性,避免由于短時電壓變化導致的誤動作需要人為延時,延時時間由用戶通過分檔開關進行選擇,由開關量輸入系統。
(6)雙電源供電雙分狀態:系統負載于雙分狀態時,不論兩組電源是否正常以及系統處于“手動”和“自動”的預置狀態,系統都仍然保持雙分狀態。
(7)產品保護功能:具有過負荷和短路保護,斷相和斷路保護,失壓和欠壓保護。
(8)高性能ARM程序控制:采用模塊化結構設計,具有極強的抗電磁干擾能力,適合在強電磁干擾的復雜環境中使用,無噪聲運行。采用嵌入式安裝方式,結構緊湊,節能降耗,符合國家綠色電氣產品標準。同時具有RS232、RS485串行通信接口,借助于PC或數據采集系統上運行的軟件,能提供一個簡單實用的對工業和民用建筑物的雙電源切換管理方案。
2.3 軟件系統
在高壓環境中,不可避免地會遇到電源波動、電磁波輻射等干擾。當遇到強干擾時,運行的程序會產生異常、出錯、跑飛,甚至死循環,造成了系統的崩潰。因此,除了在電路上增加抗干擾的措施外,單片機型號的選取和一些軟件措施也是必要的。在軟件中設置了看門狗程序,以監控系統的運行。
控制器的軟件功能以檢測和控制為主,采用C語言編寫。外部硬件電路已經完成了電壓故障的判定,程序只需讀取相應的故障狀態位輸入,經位判斷后轉入相應故障處理程序即可。其切換過程的控制是雙電源轉換控制器的核心功能之一,雙電源轉換控制器的軟件流程見圖3。
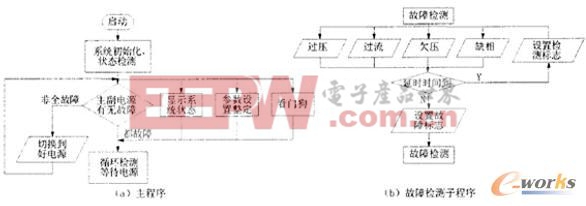
圖3 雙電源轉換控制器的軟件流程
2.4 抗干擾措施
干擾會影響控制器的穩定運行,所以在電路設計方面采取了多種抗干擾措施:
(1)通過隔離器件傳輸信息,在電氣上將單片機與各種傳感器、開關等隔離開來,可以較好地防止串模干擾。
(2)合理布置地線,將系統中的數字地與模擬地分開,最后在一點相連,避免了數字信號對模擬信號的干擾。
(3)電源進線端加去耦電容,在削弱各類高頻干擾。
3 遠程監控模塊
遠程監控包括設備狀態及電力參數采集、GPRS通信網絡和監控中心3大部分。電力設備在生產現場安裝,通過現場的控制系統采集設備狀態及電力參數;GPRS通信網絡是監控中心與現場設備問數據傳輸的橋梁,通過GPRS網絡使現場設備的相關參數能夠定時傳送到監控中心計算機:監控中心一方面通過GPRS網絡與現場監測器進行雙向通信,另一方面為用戶提供一個可視化界面,讓用戶足不出戶即可了解遠方設備相對實時的運行狀況。遠程監控模塊結構見圖4。
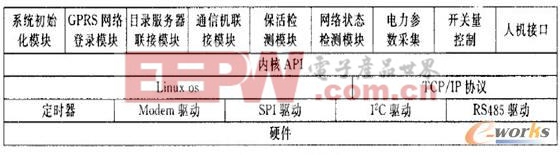
圖4 遠程監控模塊圖
4 試驗測試
根據國家技術標準,本研究對研制成功的樣品進行了性能指標測試,測試結果表明,控制器能在不同的設定故障情況進行識別,并按照用戶的要求準確動作,所測結果完全滿足設計要求與實際使用需要。
5 總 結
本文研制的雙電源轉換控制器能夠對雙路電源的過壓、欠壓和缺相等故障進行檢測,不僅能實現自投自復、只常、只備、自投不自復、自動脫扣檢測、斷電再扣等工作模式,且能準確地實現兩路電源間的可靠切換。其主要有以下幾點:①設有3工位自動隔離開頭,有3個投切位置;②為了防選源向全離閘必須先解保險鎖;③操作機構除自動切換系統外還保留了手動切換方式,提供了備用的操作方法。







評論