基于ARM單片機的自動測高測距小車的研究與設計

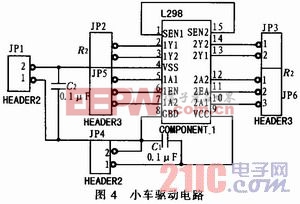
2)驅動電路 本車采用原車自帶的雙直流減速電機,74V就能很好的工作。電機驅動選用專用驅動芯片L298N,該芯片分別獨立控制兩路電機的起停和轉向,保證兩路電路的參數的對稱,有利于保持小車行駛的穩定性和精確性,也降低了電路的設計難度。電機驅動電路如圖4所示。本文引用地址:http://www.cqxgywz.com/article/172935.htm
4 系統軟件設計
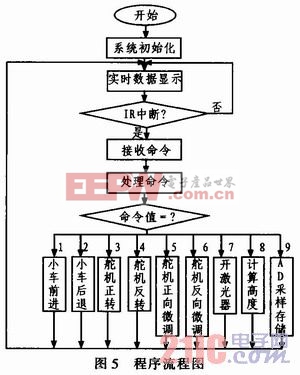
本系統采用LM3S615ARM作為控制芯片,通過紅外遙控控制小車水平行走,調節角度傳感器采集數據,每次測量一組數據將角度數據和水平行駛距離存儲并等待下一次操作。程序流程圖如圖5所示。
5 系統調試與測試
5.1 系統調試
1)舵機調試 將舵機、角度傳感器和激光器安裝好。安裝舵機時必須保證舵機能順時針旋轉90°以上,激光器與小車水平,角度傳感器的輸出電壓小于2 V。
2)小車速度控制 為使小車能走直線,系統使用了兩個PWM端口控制小車的左右輪速度,將其PWM占空比設為相同,然后測試修改占空比直至小車能走直線。
3)紅外軟件解碼 紅外編碼采用了脈沖位置調制方式(PPM),利用脈沖之間的時間間隔來區分“0”和“1”。調試時通過改變碼字所對應的時間,直至能接收到正確的數據。











評論