移動機器人無線實時反饋控制系統的設計

在連續控制系統中,PID控制算法的控制規律可以寫成如下的形式:

式中,u(t)為PID控制器的輸出,也稱為被控對象的控制輸入;ε(t)為偏差; Kp為比例系數;Ti為積分時間常數;Td為微分時間常數。為了在數字控制系統上實現PID控制,需將連續PID控制規律化成離散型的PID控制規律,即用差分方程表示。為此,取T0為采樣周期。由于采樣周期遠小于信號變化的周期,可以用矩陣面積求和的方法近似式(1)中的積分作用,用向后差分的方法近似微分作用,則式(1)可以化為:

式(4)稱為PID控制器遞推公式。應用(4)式計算采樣時刻k的控制器輸出u(k),可以極大地節省計算機內存空間和計算時間,使實時控制成為可能。
許多控制系統的執行機構本身具有記憶功能,例如步進電機作為執行元件,具有保持歷史位置的功能,當控制器給出1個增量信號時,執行機構在原來位置上移動某一定位置,達到新的平衡位置。在這種情況下,需要采用增量型PID控制算法。設被控對象的控制輸入增量為Δu(k),即:
 本文引用地址:http://www.cqxgywz.com/article/163152.htm
本文引用地址:http://www.cqxgywz.com/article/163152.htm式(5)稱為增量型PID控制算法。
增量型PID與位置PID控制算法,本質上是一樣的,僅在計算方法上有所變化。增量式算法一般用于步進電機之類的對象,但由于本文所用到的機器人的電機為非步進電機,它所輸入的控制量應為絕對數值。所以本文采用位置式PID算法[5]。
對于PID 3個參數的調節有各種不同方法,在本實驗中主要是試湊法。試湊法也要遵循一定的規律,一般來說,增大比例系數Kp,將加快系統響應速度,減少系統靜態誤差,但直接影響系統的穩定性。增大積分時間常數Ti,有利于提高系統的穩定性,但同時也加大了系統消除穩態誤差的調節時間。微分控制作用,將改善系統的動態性能。
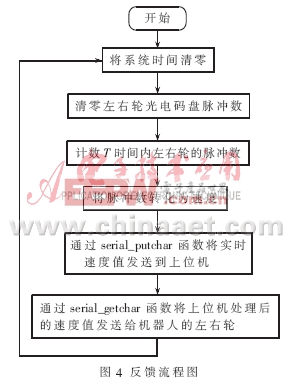
在整個反饋系統的設計中,還有一個重要問題就是系統的采樣時間T,本系統的采樣時間不能設置得太短。由于機器人的測速是由光電編碼器來完成,而實驗中用到的碼盤條紋只有66等份,時間太短,測速不準確,同時因微分作用加強,使得速度值抖動很大。此外,機器人本身存在非線性特性,這樣就必須選擇一個合適的采樣時間。經過實驗,當采樣時間≥0.5 s時,機器人反饋回來的速度較平穩,抖動明顯減小。整個反饋控制系統的程序流程圖如圖4所示。
4 仿真結果分析
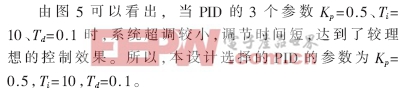
通過調節PID的3個參數,記錄下機器人每次輸出的速度值,然后再用MATLAB進行仿真,通過測得實際數據的仿真圖如圖5所示。
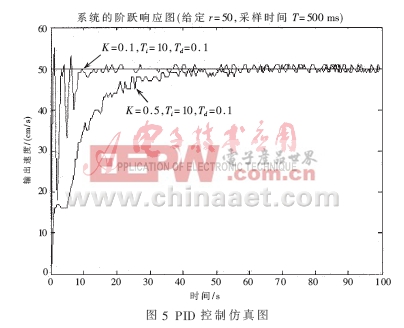
本文提出的PC機對機器人的無線實時反饋控制,在20 m以內的距離都可以實現,且實時性良好。對每一個采樣時間內反饋回來的數據PC機都能及時處理,并把它送回給機器人,這樣機器人實時地接收數據、實時地接收PID校正后的運動狀態,因此機器人就可以按事先設定好的狀態行走,從而達到了控制的目的。

pid控制器相關文章:pid控制器原理








評論