基于COMS圖像傳感器的太陽自動跟蹤控制器設計與實現

(1)參數設置。包括設置當前時間、波特率、通信端口、圖像傳感器運行時間間隔等。
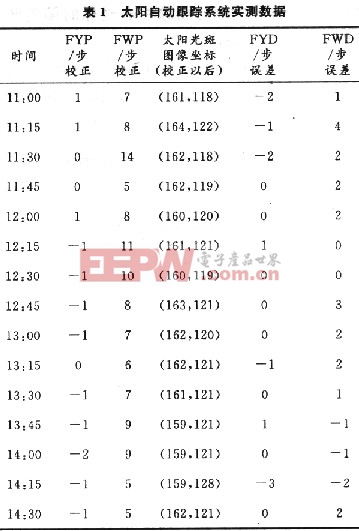
(2)運行VC++程序。上位機中VC++程序首先調用sun函數,返回此時的太陽高度角和方位角,換算成俯仰和方位步進電機所需的步數。只記錄下由Matlab生成txt文件中的需要校正的步數。
(3)系統自動校正完成后,Matlab再次寫txt文件,保存校正后太陽光斑的圖像坐標,以及光斑質心坐標與圖像中心坐標的偏差。此時記錄。
(4)每隔5 min重復(2),(3)步驟。
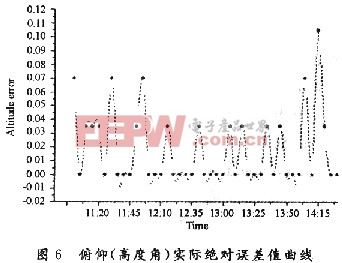
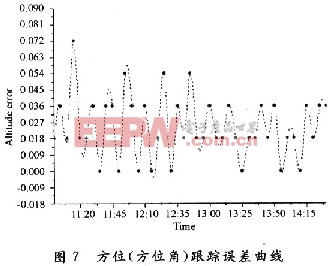
圖6和圖7給出了太陽高度角和方位角的誤差曲線。由曲線看出,采用基于圖像傳感器的太陽自動跟蹤控制器后絕對誤差較小且保持相對穩定。通過對實測數據的分析表明:在該系統中,高度角跟蹤絕對誤差小于0.12°,方位角跟蹤絕對誤差小于0.08°,采用圖像傳感器對太陽進行跟蹤后,得到了很高的精度,且可靠性提高。
4 結語
該跟蹤控制器可以連續跟蹤太陽的角度變化,更準確實現對太陽運動的跟蹤。當出現陰天或多云情況下,系統調用時鐘算法,使得裝置連續跟蹤。經過實驗測試,各項指標均達到了設計要求。
控制器采用低速處理器實現了對太陽光斑的采集及定位,可應用于各種太陽能設備,提高太陽能的利用率。如果使用步進電動機的微步距控制技術,即用細分技術實現將步進電動機一個整步均分為若干個更細的微步,可以使整個控制系統更加精準,可用來實現對各種點光源的檢測。












評論