一種新的模糊PID控制在電機軟啟動中的仿真

2 控制系統設計
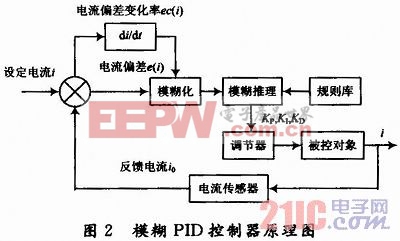
人們運用模糊數學的基本理論和方法,把規則的條件和操作用模糊集表示,并把這些模糊控制規則及有關信息作為知識存入計算機知識庫中,然后計算機根據控制系統的實際響應情況,運用模糊推理,即可自動實現對PID參數的最佳調整,這就是模糊PID控制。模糊PID控制器以誤差e和誤差變化率ec作為輸入,利用模糊控制規則在線對PID的3個參數進行調整,以滿足不同時刻的e和ec對PID參數自整定的要求。模糊PID控制器的基本結構如圖2所示。在交流電機軟啟動的過程中,通過檢測啟動電流i設定值的偏差,以及偏差的變化率,這兩種檢測信號作為模糊PID控制器的兩個輸入,分別用e(kt),ec(kt)表示,輸出為KP,KI,KD,再通過反模糊化,經過調節器輸出控制晶閘管的導通角,調整電壓的輸出,進而達到電機平穩軟啟動的要求。本文引用地址:http://www.cqxgywz.com/article/161571.htm
(1)模糊化
在電機軟啟動控制器系統中設計模糊PID控制器時,采用雙輸入/三輸出模式的Fuzzy控制器結構。分別用e(kT),ec(kT)表示,輸出為KP,KI,KD。為了方便描述,定義如下:

式中:T為采樣時間;I(kT)為啟動電流給定值;I0(kT)為第k個采樣時刻的電流輸出。

pid控制器相關文章:pid控制器原理
三相異步電動機相關文章:三相異步電動機原理




評論