基于以太網和CAN總線的樓宇自動化系統設計

3 軟件架構
軟件由主控機人機接口界面、上位機軟件、設備節點軟件組成。上位機軟件包括嵌入式TCP/IP協議簇、以太網收發軟件包、CAN收發軟件包等,設備節點軟件包括CAN模塊、數據采集分析模塊等組成。
3.1 移植μC/OS-Ⅱ實時操作系統的方法
上位機既要和主控機通信,又要負責管理下屬的設備節點,負載較大。移植μC/OSⅡ操作系統可以使上位機具有多任務運行的功能。 μC/OS-Ⅱ是一個完整的,可移植、固化、裁剪的占先式實時多任務內核。它包含了任務調度、任務管理、時間管理、內存管理和任務間的通信和同步等基本功能。μC/OS-Ⅱ采用的是可剝奪型實時多任務內核,可剝奪型的實時內核在任何時候都運行就緒了的最高優先級的任務。
在ARM下移植μC/OS-Ⅱ操作系統主要是修改μC/OS-Ⅱ中一部分與CPU相關的匯編代碼,這里主要是任務上下文的切換代碼。
任務切換發生在任務調度的時候,μC/OS-Ⅱ下任務調度的時機主要有以下幾種情況:1)高優先級的任務因為需要某種臨界資源,主動請求掛起,讓出處理器,此時將調度就緒狀態的最高優先級任務并執行。2)高優先級的任務因為時鐘節拍到來,在時鐘中斷的處理程序中,內核發現更高優先級的任務就緒,獲得了執行條件,則在中斷后直接切換到更高優先級任務執行。
任務切換就是保存前一個任務的基本信息,同時讀取新任務在上一次被切換時保存的這些信息。調度器將前一任務的上述信息保存在該任務的棧空間中,其目的是為了下次運行時能夠恢復到被切換時的狀態,調度器將從該任務的棧空間中讀取上述信息,從而從該任務上次被中斷的位置繼續執行,其基本過程如下:
1)將當前任務的PC位置、通用寄存器數據、CPU狀態入棧。
2)將全局變量OSPrioCur(當前任務優先級變量)的值修改為全局變量OSPrioHighRdy(最高優先級任務優先級)的值,即把最高就緒任務優先級設置為新的當前任務優先級。
3)將原任務TCB的第一個成員(指向棧頂的指針*OSTCB-StkPtr)的值修改為當前SP寄存器的值,以便再次返回。
4)獲取最高優先級的任務控制塊中第一個成員(指向堆棧棧頂指針*OSTCBStkPtr)的值并將其保存到SP寄存器中。
5)將OSTCBCur的值修改為新就緒最高優先級任務的任務控制塊地址。
6)將新任務的PC地址、通用寄存器數據、CPU狀態出棧,開始執行新的任務。
因為任務切換是將當前任務的基本信息保存起來(入任務棧),并加載新任務的基本信息(出棧),而這些信息很大一部分都被存儲在CPU的寄存器中,因此根據處理器的不同,此函數在實現上略有差異,一般都采用匯編語言實現。
3.2 編寫設備驅動程序
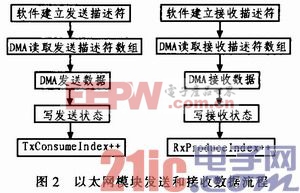
設備驅動程序主要包括以太網和CAN軟件包,以太網驅動主要是初始化LPC2478內部以太網模塊的一些重要的寄存器如MAC配置寄存器、MAC地址寄存器、命令寄存器、狀態寄存器、中斷狀態寄存器等等。以太網模塊內部采用DMA方式讀取數據,分別使用接收、發送描述符數組來表示接收和發送的數據塊。以太網模塊發送和接受數據的流程如圖2所示。本文引用地址:http://www.cqxgywz.com/article/159681.htm
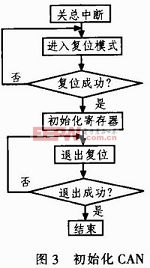
CAN的初始化包括初始化時鐘分頻寄存器,同時選擇能支持擴展幀的PeliCAN模式,設置接收中斷,采用中斷來接收數據,設置總線時序寄存器、輸出控制寄存器等。初始化CAN流程圖如圖3所示。










評論