射頻識別技術的車輛主動定位方法

根據道路的總車道數目N的不同,定位車道的判定方法分別為:
N=4:當右側定向天線和全向天線讀到標簽信息后,判定車輛位于1車道(lane=1);當左側定向天線和全向天線讀到標簽信息后.判定車輛位于2車道(lane=2)。
N=6:當右側定向天線和全向天線讀到標簽信息,判定lane=1;當左側定向天線和全向天線讀到標簽信息,判定lane=3;當只有全向天線讀到標簽信息,判定lane=2。
N=8:如果閱讀器有側天線和全向天線讀到標簽信息,判斷lane=1;如果閱讀器左側天線和全向天線讀到標簽信息,判定lane=4;如果只有全向天線讀到路邊一側的標簽信息,判定lane=2;如果只有全向天線讀到中央隔離帶一側的標簽信息,判定lane=3。
N=10:車輛進入高速公路,此時lO為2W,在1、2、4、5車道時,可以讀到標簽信息,確定是雙向10車道,立即將lO調整為3W。當車輛位于3車道時,無法讀到任何標簽信息,等待一定時間,如果仍然讀不到任何標簽,控制單元立即將lO調整為3W。此時的判斷方法是:如果閱讀器右側天線和全向天線都讀到路邊一側的標簽信息,判定lane=1;如果閱讀器左側天線和全向天線讀到中央隔離帶一側的標簽信息,判定lane=5;如果只有全向天線讀到路邊一側的標簽信息,判定lane=2;如果只有全向天線讀到中央隔離帶一側的標簽信息,判定lane=4;如果全向天線讀到路兩側的標簽,判定lane=3。當某一時刻天線讀到標簽的信息N≠10,將lO重新調整為2W。
1.4 車輛位置的確定方法
定位到車道之后,可以根據下述方法計算出車輛的位置坐標。全向天線讀到右側標簽、讀到左側標簽如圖3和圖4所示。本文引用地址:http://www.cqxgywz.com/article/154105.htm
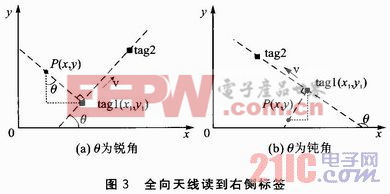
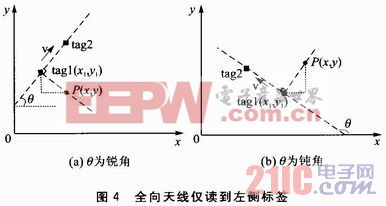
P為車輛的位置,v代表車輛的運動方向,兩個標簽所在的直線與X軸的夾角記為θ,(x1,y1)為tag1的坐標。
![]()
當車載閱讀器全向天線能夠讀到路肩的標簽時的位置計算方法為公式(1)、(2);當車載閱讀器全向天線只能讀到中央隔離帶一側的標簽時的位置計算方法為公式(3)、(4)。

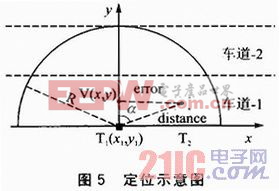
2 定位誤差分析
以雙向4車道道路的第一車道為例。圖5表示車輛位于第一車道時與標簽T1的位置關系,R為閱讀器全向天線的閱讀半徑,V(x,y)為車輛定位坐標,distance為車輛與標簽的距離,α為車輛相對于標簽的位置角度,error為定位誤差。






評論