利用曼碼調制的非接觸IC卡讀寫程序編制

基站產生固定間隙的射頻振蕩,并通過控制兩個間隙之間的振蕩時間對位數據1和位數據0進行編碼,持續地發送位數據流,完成寫操作。寫操作射頻振蕩波形示意如圖4所示。
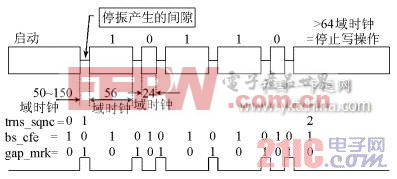
圖4 寫操作時的信號流
圖4寫操作時的信號流非接觸IC卡插入基站后,射頻線圈的耦合產生載波振蕩,利用兩次相鄰停振之間的不同時間間隔,區分位數據1和位數據0的編碼。停振間隙約在50~
150域時鐘;位數據0的持續振蕩時間間隔為24域時鐘;位數據1的持續振蕩時間間隔為56域時鐘。當停振間隙結束后,持續振蕩的時間間隔高于64域時鐘,則IDIC退出寫操作方式。
考慮到寫操作啟動(start)時,有一頻率穩定過程,寫操作停止(stop)時,有一EEPROM的寫入過程約16ms,于是將start和stop兩個階段均以20ms計。圖4中標注的trnssqnc為發送順序編號,啟動階段為0,位數據流發送階段為1,發送結束階段為2。
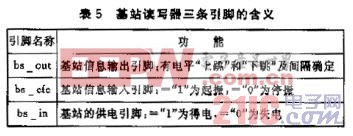
基站讀寫器上有三個引腳:bsout、bscfe和bsin,它們的含義見表5。
向e5550寫位數據時,有四種合法的數據流,具體如圖5所示。其中,OP為操作類型碼,包含兩位,10表示即將進行的是寫操作,11為終止IDIC操作碼。多IDIC操作情況下,用這一特性可逐一控制應答器,使待控應答器逐一產生穩定的射頻振蕩。當方式數據區的第28位(usePWD)為1時,在寫操作碼10之后,位數據流有33位,是按區寫入的。其中的第一位為鎖定位L,L=1表示該區為只讀區,L=0表示該區為讀寫區,其余的32位為位數據。ADR為該位數據流的存放數據區,取值范圍為0~7。

根據上述的載波振蕩特性,利用carriercnst參數進行界定(見表7),讀寫操作過程中,均使用了2μs為單位的計數值作為定時單位,目的是要使用MCS-51系列的微控制器的定時器。

結束語
采用曼碼調制的非接觸IC卡讀寫程序便不難編制,實現IDIC的完整功能,還需要其他的一些程序模塊,如數據存儲格式、編碼的加密算法,一次讀/寫操作中若出錯,則須重復進行讀/寫操作、究竟重復幾次、讀/寫操作過程在超時后退出等,這些均可根據應用對象的需求予以相應的解決。





評論