基于MATLAB的控制系統實時仿真平臺設計
——

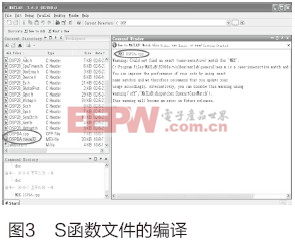
(1)分析模型和對模型描述文件進行編譯
本文引用地址:http://www.cqxgywz.com/article/146822.htmRTW分析用戶的Simulink圖形模塊.mdl,計算模塊參數,遞推采樣時間、確定模型各模塊的執行次數等信息,并把模型編譯成以model.rtw為文件名的中間描述文件。
(2)目標語言編譯器(Target Language Compiler)將模型描述文件.rtw轉換為指定目標代碼的解釋性編程語言。
(3)生成自定義聯編文件(makefile)
針對不同的目標環境,根據系統模板聯編文件(Template Makefile)生成自定義聯編文件model.mk。
(4)生成可執行程序
RTW將調用聯編實用程序make unity,對生成的聯編文件.mk,進行編譯、鏈接,轉化為可以在目標環境中運行的.exe文件。

 ?
?
pid控制相關文章:pid控制原理
c++相關文章:c++教程
pid控制器相關文章:pid控制器原理
汽車防盜機相關文章:汽車防盜機原理









評論