DMR數字集群關鍵技術的應用研究

4FSK解調
本文引用地址:http://www.cqxgywz.com/article/145479.htm和調制過程相逆,解調的過程也分為兩部分:第一部分是正交差分解調,由4FSK調頻信號恢復四進制的基帶信號;第二部分根據基帶信號恢復原始碼元信息,包括匹配濾波、抽樣判決、反映射等模塊。接收端基帶信號的處理如圖3所示。
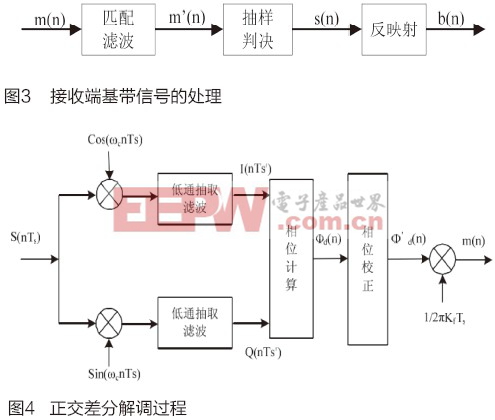
其中匹配濾波器采用與發端相同的平方根升余弦滾降濾波器;抽樣判決需要找到合適的抽判位置并建立位定時信息,而且還要確定合適的門限。抽判位置的確定可以通過相關運算找出同步碼的起始位置后進行推算。
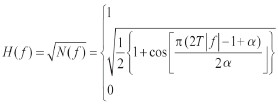
正交差分解調過程如圖4所示。同調制過程中的內插濾波相對應,正交解調過程中需要在滿足奈奎斯特定力的前提下對高采樣率的信號進行抽取,降低采樣率,減小運算量。
基帶成型濾波技術
成型濾波器的設計是能否正確恢復數據的關鍵,DMR系統采用的是平方根升余弦滾降濾波器,同時也采用相同的濾波器作為接收端的匹配濾波器。平方根升余弦滾降濾波器[5-7]頻率響應如下:
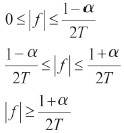
由式可以得到平方根升余弦滾降濾波器時域表達式:
![]()
可見平方根升余弦滾降濾波器的時域表達式是一個無窮階數系數對稱的FIR濾波器。實際應用中,需要對其進行截斷,即在理論的時域表達式上加矩形窗,可得到相應逼近的FIR數字濾波器。
用Matlab軟件進行平方根升余弦濾波器的設計非常方便,調用firrcos函數即可得到濾波器系數:h=firrcos(N,Fc,a,Fs,‘sqrt’)。其中N是濾波器階數;Fc是理想低通濾波器的截止頻率,為符號率的1/2;a為滾降系數;Fs為采樣率。根據DMR系統的要求,設定Fc=4800/2=2400Hz,a=0.2,Fs=4800*10,N的取值可以根據實際情況進行更改,這里采用了10倍的采樣速率,考慮MATLAB的計算能力及測試信號信噪比的不同,階數N也會有所不同。這里也可以用Matlab自帶的工具箱進行設計[8],在調試過程中發現信道機的帶內平坦度不是很好,因此在信道機的接收端設計了一個具有補償作用的補償濾波器去補償信道機的信號平坦度。
幀同步技術
在數字通信中,信號流是用若干碼元組成一個幀。在接收這些數字信息時,必須知道這些幀的起止時刻,否則接收端無法正確恢復信息。為了使接收端能正確分離各路信號,在發送端必須提供每幀的起止標記,在接收端檢測并獲取這一標志的過程,稱為幀同步[2]。接收時還需要知道每個碼元的起止時刻,以便在恰當的時刻進行抽樣判決。
DMR系統采用集中插入特殊同步碼組的方法進行幀同步,接收端按幀的周期連續數次檢測該特殊碼組,便可獲得幀同步信息。方案中所使用的是已知的特殊同步碼組:7F 7D 5D D5 7D FD,該碼組具有尖銳單峰的自相關函數、漏同步概率小;便于與信息碼區別、假同步概率小;碼長適當,可以保證傳輸效率。DMR系統對采用的幀同步碼組有嚴格的規定:幀同步碼組插入在幀的中心位置,并且對于輸入輸出語音、數據或控制信息,由不用的幀同步碼組來區分。
抽樣判決
抽樣判決是在同步之后,屬于解調的一部分。抽樣判決需要找到合適的抽樣判決位置并建立位定時信息,而且還要確定合適的門限。抽樣判決位置的確定可以通過相關運算找出同步碼的起始位置進行推算,具體方法如下:在本地存儲48bit同步碼對應的波形,然后將存儲的數據和接收波形進行滑動相關運算,即將對應點相乘累加。當本地波形與接收波形的同步碼對應上時能獲得最大相關值,返回出現該相關峰的位置,然后將該位置減去同步碼之前的符號數與每符號采樣點數M的乘積即可得到第一個判決位置,之后每隔M點就是一個抽判點。門限的確定則可以根據接受眼圖來劃分,判決點之間的間隔是10,門限電平可根據需要自己進行調整。
在解調抽樣判決時,同樣是+3的采樣值,由于前后數據不同,信號在經過濾波器濾波之后,對應的幅度信息就會產生一定程度的改變,例如前后都是+3,那么當前這個+3的幅度就會比較高,如果前后都是-3,那么當前這個-3的幅度就會被拉低。因此在對信號進行抽樣判決的時候,本方案對信號幅度進行了相應的調整,采用一種動態調整判決門限的判決方法,使采樣值前后的幅度對該幅度的影響降到最低,從而有效地優化了誤碼率,提高了通信質量。這是本方案在解調抽樣判決上做的改進,下面的測試結果會進一步驗證改進的可行性。

濾波器相關文章:濾波器原理
濾波器相關文章:濾波器原理
數字通信相關文章:數字通信原理
低通濾波器相關文章:低通濾波器原理
電源濾波器相關文章:電源濾波器原理
數字濾波器相關文章:數字濾波器原理




評論